

Project Overview
Bin picking is among the most common applications in the industrial manufacturing. Traditional robot waypoint teaching and 2D vision are not prepared for the collision-free picking of parts cluttered in deep bins.
XYZ Robotics deploys 3D vision system for a large-scale bearing ring manufacturer to support automated bin picking and machine tending. In addition to meeting the sampling inspection need, XYZ’s automation solution has built a more flexible and intelligent production line for the customer and significantly enhanced productivity.
Project challenges
- Bearing rings with dozens of specifications are toroidal, reflective, and thin-walled parts. The vision needs to recognize the front and the back sides of parts;
- Picking from corners of the bin poses great challenge to vision recognition and collision-free trajectory generation;
- The sampling inspection requires the vision system to adapt to the production flexibly.
Processes and solutions
1. Accurate recognition of reflective bearing rings and the condition in the bin

Bearing rings are randomly piled in the deep bin. AL-L industrial 3D camera recognizes 3D pose of unprocessed bearing rings accurately and guides the collision-free picking.
2. Two robot arms collaborating for efficient machine tending synchronously
Robot A picks parts and place them on a buffering tool, then the vision sends the part’s orientation to robot B.
Robot B picks parts in a designated pose and places them on the reciprocating grinder. Then, Robot B places processed parts on the transfer track, waiting for the collision-free unloading of Robot A.
3. Collision-free picking and gentle placement lead to a high emptying rate

Motion planning algorithm generates collision-free trajectory and helps handle challenges such as picking from corners and gentle placing in deep bins.
The overall handling and processing can be finished in 18 s/piece.
4. HMI helps setup sampling inspection easily

The user-friendly HMI simplifies the frequency setting of sampling inspection.
The robot can pick random parts and place them on the inspection position according to the given frequency.
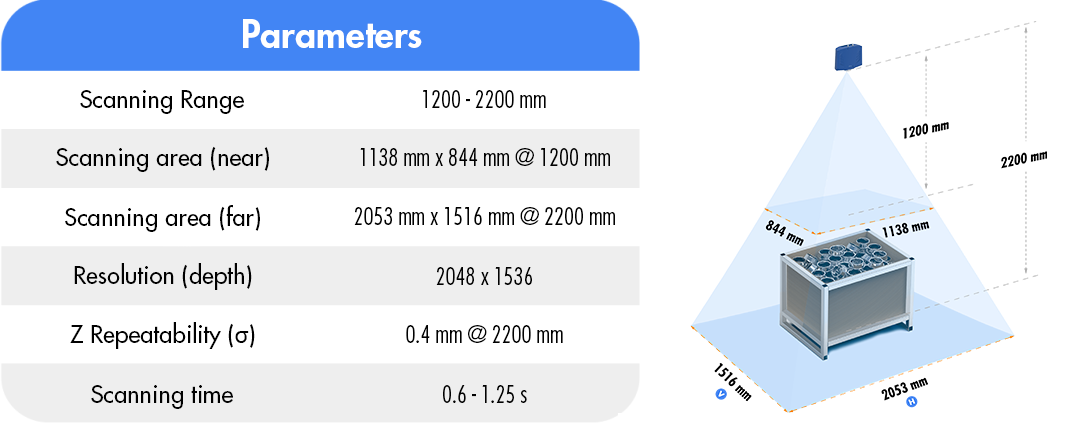
AL DLP Structured Light Camera

High precision: Z repeatability of 0.4 mm @ 2.2 m, precise reconstruction of complex structures;
Anti-reflection: powerful recognition of fine structures and glossy surfaces, suitable for processed and painted parts;
Rapid imaging: imaging in just 0.6 s









 United States
United States